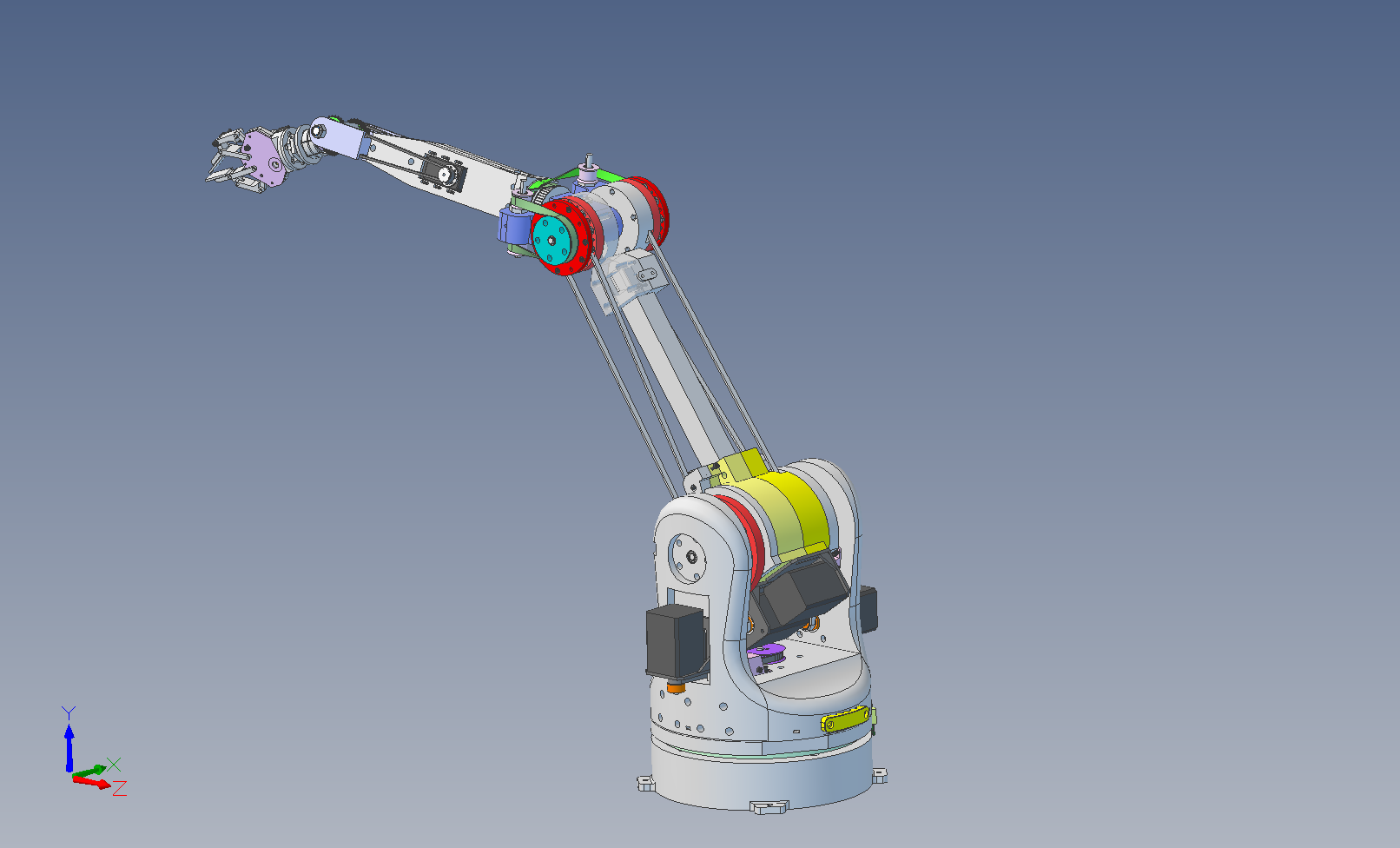
6DoF Robot Arm 0.9
My first almost complete 6-DoF robot arm is here… It’s made up of… 4 Nema 17 stepper motors to control the base, shoulder and elbow 2 MX-28AR dynamixels to control the wrist 1 RC Servo with dynamixel interface to control the gripper 4 hypocyclodic gearboxes to gear down the steppers… Continue Reading 6DoF Robot Arm 0.9
{kind=link}
- Posted on:
-
Author:
frankt
- Categories: Uncategorised
- Leave a comment: 6DoF Robot Arm 0.9